

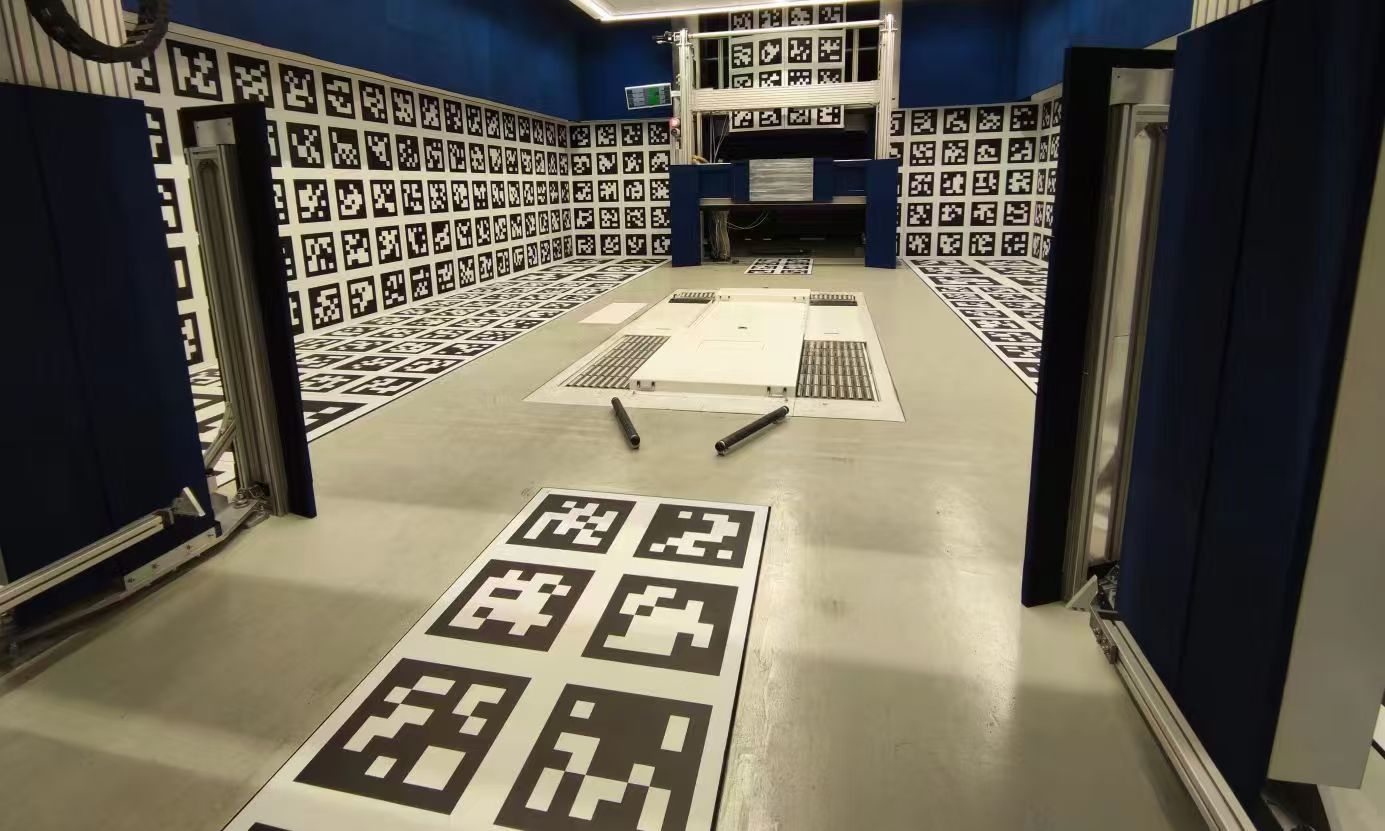
自動駕駛輔助駕駛標定產線,汽車總裝標定產線案例
作者:昆山瑞視儀器設備有限公司 發布日期:2024-08-01 22:10:01
自動駕駛只系統中的傳感器標定(Sensor Calibration)是確保各個傳感器正確運作并提供準確數據的關鍵步驟。標定過程旨在消除傳感器之間的誤差,從而實現更精確、可靠的環境感知能力。以下是幾種主要的傳感器標定方法:
1.內參數 標定
內參數標定針對單一傳感器,主要用于確定傳感器自身的特性,如焦距、畸變系數、分辨率等。例如,在攝像頭標定中,常使用張正友法(Zhang's Method)、棋盤格法等技術確定攝像頭的內參數。
2.外參數標定
外參數標定關注傳感器相對于車體或其他參考坐標系的位置和姿態。這包括傳感器的平移向量(x,yz)和旋轉矩陣(Rol,Pitch.
Yaw)。外參數標定可以通過多種方式完成,如手動測量、使用標定物等。
3.時間同步標定
由干自動駕駛系統中的多個傳感器會同時工作,因此需要確保它們之間的時間同步。時間同步標定通常使用硬件觸發或軟件同步算法來實現,以保證從不同傳感器獲取的數據在同一時刻捕獲。
4.傳感器間標定
在自動駕駛系統中,不同類型的傳感器(如攝像頭、激光雷達、雷達等)需要進行聯合標定。這意味著需要確定各個傳感器之間的空間關系和時間同步。傳感器間標定可以采用多種方法,如基于目標物的標定法、基于場景的標定法等。
傳感器標定是提高自動駕駛系統性能的關鍵環節。正確標定的傳感器可以確保更精確的數據輸入,有助于提高整個系統的決策質量和安全性。在實際應用中,標定過程可能需要根據特定設備和場景進行調整和優化。

